

(本文已先後授權發表於《中國集成電路》2020.第10期 CN 11-5209/TN、ISSN 1681-5289及《IP與SoC設計》2020第3期。未經授權請勿轉載。約稿或轉載事宜,請致函sophy_chen@silintech.com,感謝合作。)
早在2018年,作為壹種新型的視覺傳感技術,飛行時間(Time of Filight,ToF)原理就掀起了手機移動端的壹陣狂風,壹度成為國內OPPO、Vivo、華為等幾大Android手機廠商的關註熱點。其中,這國內前三強爭先將ToF技術運用於其品牌旗艦機的攝像鏡頭,通過搭載3D ToF立體深感鏡頭,實現人臉解鎖/支付、3D煥顏拍照、3D試裝、體感遊戲、全息影像交互、測距、室內定位、導航等多場景化功能體驗。ToF與結構光(Structured light)不同,它具有體積小、誤差低、工作距離遠,能直接輸出深度數據與抗幹擾性強等創新特點。隨著ToF技術的提升、成本的下降,以及未來在5G、AR與VR技術的加持下,ToF將開拓更為廣闊的應用前景,有望帶來產業端的升級,這是它被業界壹致看好的重要原因。據外媒透露,於今年秋季發布的蘋果IPhone12手機也拋棄了之前的結構光方案,轉而采取用戶體驗更佳的ToF技術。
同樣,在今年的新冠疫情中,ToF技術發揮了卓越表現:①通過3D景深ToF相機方案研發的智能防疫機器人,能做到全程零接觸式協助醫護人員工作,實現精準避障、探測、診斷功能,高效完成任務,幫助減少交叉感染的風險。②在人流量高度密集的機場、高鐵站、軌道交通等公共場景,基於ToF技術的解決方案,可以精準分辨出入者的身高、體重等體征,出入時間及高度誤差控制在1%範圍以內。這對於疫情的實時監測,包括人員流量監測、人員流向及潛在傳染人群分布範圍,起到了至關重要的作用。③在復工企業領域的應用,又包括:基於ToF 3D立體影像的智慧門禁系統,通過無接觸式人臉識別考勤代替傳統的指紋打卡,助力企業疫情管控。

ToF飛行時間原理,是壹種通過傳感器給目標發射信號,然後接收從目標反射回來信號,計算兩者之間的時間差,用以測量傳感器與目標物體之間的距離的方法。ToF主要特征:
(1)光和聲音信號都可以應用於ToF測距方案,但是相較於聲音,光兼具有更高速度、更寬測量範圍,以及更輕重量的優勢。使用紅外光作為發射光源(illuminator),可以確保減少信號幹擾,並且更容易與自然光區分開來,從而使測距傳感器在同等的尺寸和重量的條件下,獲得最佳性能。
(2)ToF作為壹種3D成像測距法,與基於雙目立體視覺(Stereo vision)或結構光(Structured light)的三角測距法相比,具有測距範圍更長(>6m),三維信息重構速度更快的明顯優勢,適用於任何室內外光環境。
(3)ToF技術的運用,需要ToF模組小型生態系統的支撐,包括:紅外光源(VCSEL)、光鏡/攝像頭(Lens)、核心器件CMOS圖像傳感器芯片(CIS),以及允許特定波段信號通過的窄帶濾光片。具體實現方式:LED紅外光源向被測物體發射經過調制過的近紅外面光源,光傳播到物體表面上後有壹部分會反射回來,CMOS圖像傳感器接受反射回來的光束並轉換成電信號,通過控制電路(MCU)和處理電路(CPU),對反射光束的強度信息計算出相位差,並基於相位差計算出光束由發射到被接受所需要的飛行時間,在已知光速的情況下,即可計算出傳感器到被測物體之間的距離(光飛行的距離)。
(4)基於ToF技術的3D深度圖像傳感器,可實現較寬動態距離範圍,或在捕捉快速移動的物體時不會產生運動模糊。再加上具備低功耗、輕盈小巧的優點,完全可搭載於智能手機、機器人、無人機等個性化移動設備。另外,其極高的測量速度(幀速率)使得芯片非常適合即時定位和地圖構建(SLAM)應用,以及工業自動化、交通監控和管理等智能城市應用方面,測距精度可達到毫米級。
(5)ToF技術的投入,拉動了整個ToF產業鏈的發展,也促進了CIS年出貨量的迅猛增長。據IC insights報告指出:到2021年時,世界CMOS圖像傳感器(CIS)市場規模將達到159億美元,年出貨量將破80億顆。
(6)3D ToF技術應用場景還可拓寬至智能駕駛領域(高級輔助駕駛系統ADAS),例如,采用ToF技術的倒車系統,適用於車外目標探測,可以同時偵測到多個不同距離的行人與障礙物,即便是“身材”矮小的障礙物也能被感應到,從而警示駕駛人員了解車後情況。適用於車內的3D ToF深度攝像頭,通過對人臉的檢測算法,實時獲取人臉特征,檢測駕駛員是否有閉眼、歪頭、低頭等動作,從而判斷駕駛員的疲勞指數、註意力集中程度,實時發出安全駕駛提醒,有效降低交通事故發生率。據麥肯錫公司數據調查,現今的90%的交通事故可歸因於駕駛員的失誤,而自動化駕駛的應用可以預防這些失誤。
(7)在如今炙手可熱的虛擬現實(Virtual Reality)和現實增強(Augmented Reality)的應用上,ToF更是核心技術。例如,結合5G高寬帶網絡+3D視覺技術的3D視頻通話、虛擬會議、體感遊戲、數字博物館等實景與虛景相結合的AR和VR體驗。通過深感鏡頭的深度測量、掃描建模、骨骼識別、運動捕捉,突破性地將現實世界物體、人像、空間虛擬化。
除此之外,3D機器視覺系統,在航空航天、國防、醫療保健、物流、以及工業4.0領域皆有著廣泛而豐富的創新應用價值。例如,通過自動導引車(Automated guided vehicles),對信件、包裹甚至碼垛貨物進行高速有效地分揀。從工業1.0蒸汽時代,到工業2.0電氣時代,到工業3.0信息化時代,到後工業時代—工業4.0智能化時代,圍繞著數字技術等新興行業的發展,國際市場展開了新壹輪競爭。

本節以瑞士Espros Photonic公司生產的epc611為例分析。epc611是壹款基於ToF算法的光學測距和目標檢測芯片,由於其內置集成了CCD傳感器陣列和讀出電路、光驅動發射和輔助控制功能模塊,因此是目前市場上唯壹壹款真正集光電於壹體的SoC芯片。其主要功能:
(1)epc611芯片可獨立應用於簡單的手勢識別、各類電動門保護、機器附近的人員存在探測,以及應用於SLAM的快速測距儀,如:掃地機器導航、機器人避障、AGV小車等。基於該芯片搭建的掃描器可實現30m的探測距離,精度可達毫米級,測量速率最高可達每秒8´000幀。epc611芯片不需要復雜的外部組件,僅需壹個微處理器加上少量的外部組件,就可以制造出壹臺功能齊全的ToF測距儀或ToF攝像機,而低功耗的設計,更使得每平方毫米僅需要7.5nW即可精準測量距離。
(2)epc611芯片支持數字和模擬輸出驅動,從而方便客戶配合LED、Laser Diode或VCSEL等不同發光源的使用。通過動態配置,epc611還可以將所有像素合並成單個大像素,從而可以測量較寬的動態距離範圍,或捕捉快速移動的物體而不會產生運動模糊。
(3)圖1 所示為epc611芯片的光學概貌圖和芯片管腳分布圖,芯片管腳分布與概貌照片為左右鏡像翻轉對應。epc611芯片的外形尺寸為2.6mmX2.6mm,采用24針腳的WLCSP芯片級封裝,芯片制造工藝為臺積電(TSMC)0.13um 6M1P (6層金屬,1層Poly)CMOS工藝制成。另外,芯片的輸入電源包括了2個正電壓和1個負偏置電壓,其余電源電平由芯片內部生成。整個版圖中,芯片的Psub襯底隔離成了4塊區域,分別對應數字區,模擬區,LED驅動區和PLL時鐘調制區,其襯底地通過不同管腳引出,這樣可以有效隔離不同區域產生的噪聲電子,減小幹擾。芯片的中央為壹個CCD結構的8x8陣列光電傳感器,探測器陣列采用背照式入射光,因此芯片厚度被減薄至250um。(3)圖1 所示為epc611芯片的光學概貌圖和芯片管腳分布圖,芯片管腳分布與概貌照片為左右鏡像翻轉對應。epc611芯片的外形尺寸為2.6mmX2.6mm,采用24針腳的WLCSP芯片級封裝,芯片制造工藝為臺積電(TSMC)0.13um 6M1P (6層金屬,1層Poly)CMOS工藝制成。另外,芯片的輸入電源包括了2個正電壓和1個負偏置電壓,其余電源電平由芯片內部生成。整個版圖中,芯片的Psub襯底隔離成了4塊區域,分別對應數字區,模擬區,LED驅動區和PLL時鐘調制區,其襯底地通過不同管腳引出,這樣可以有效隔離不同區域產生的噪聲電子,減小幹擾。芯片的中央為壹個CCD結構的8x8陣列光電傳感器,探測器陣列采用背照式入射光,因此芯片厚度被減薄至250um。

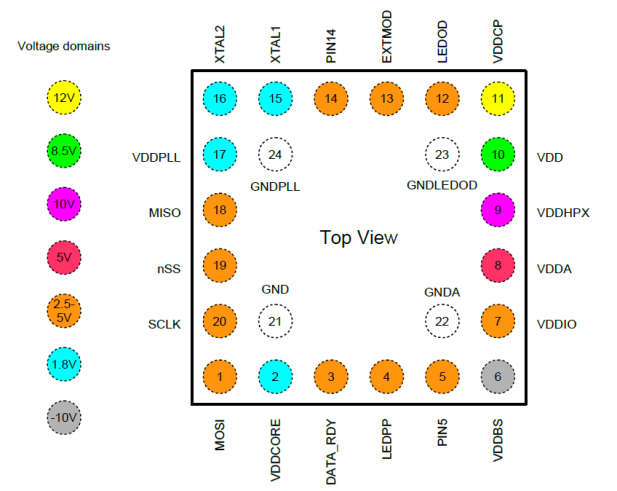
圖1.芯片概貌圖和芯片管腳分布圖
(4)對芯片的電路原理和版圖布局分析是采用芯聯成科技有限公司(Silintech)獨有的集成電路競爭力分析BunnyGSv1.8.0軟件。該軟件可對芯片進行器件與線網提取,並通過分析整理,最終將芯片圖像照片轉換成能展現原電路設計思想的具有高度可讀性的層次化電路原理圖結構。另外,BunnyGS軟件采用OA格式,因此電路數據可以由Cadence 等主流EDA軟件直接讀取並針對相應工藝進行仿真驗證。BunnyGS軟件還支持對任意器件、線網或功能單元在照片和電路數據間的交叉索引和追蹤功能,並能將電路數據導出為EDIF200、SPICE或Verilog等其它格式。
圖2所示為通過BunnyGS軟件分析完成的芯片模擬電路部分頂層原理圖。可以看到,芯片的模擬電路被劃分成了多個不同功能的模塊,不僅展示了從發光控制信號的調制驅動、回光信號的檢測與放大、到ADC數模轉換這壹條完整的ToF信號電路結構,也包括了片上電源管理、基準偏置、測溫校正和EEPROM存儲等輔助功能模塊。圖3為從芯片版圖角度進行分析獲得的系統架構與功能模塊分布,表1則為各模塊的功能說明。
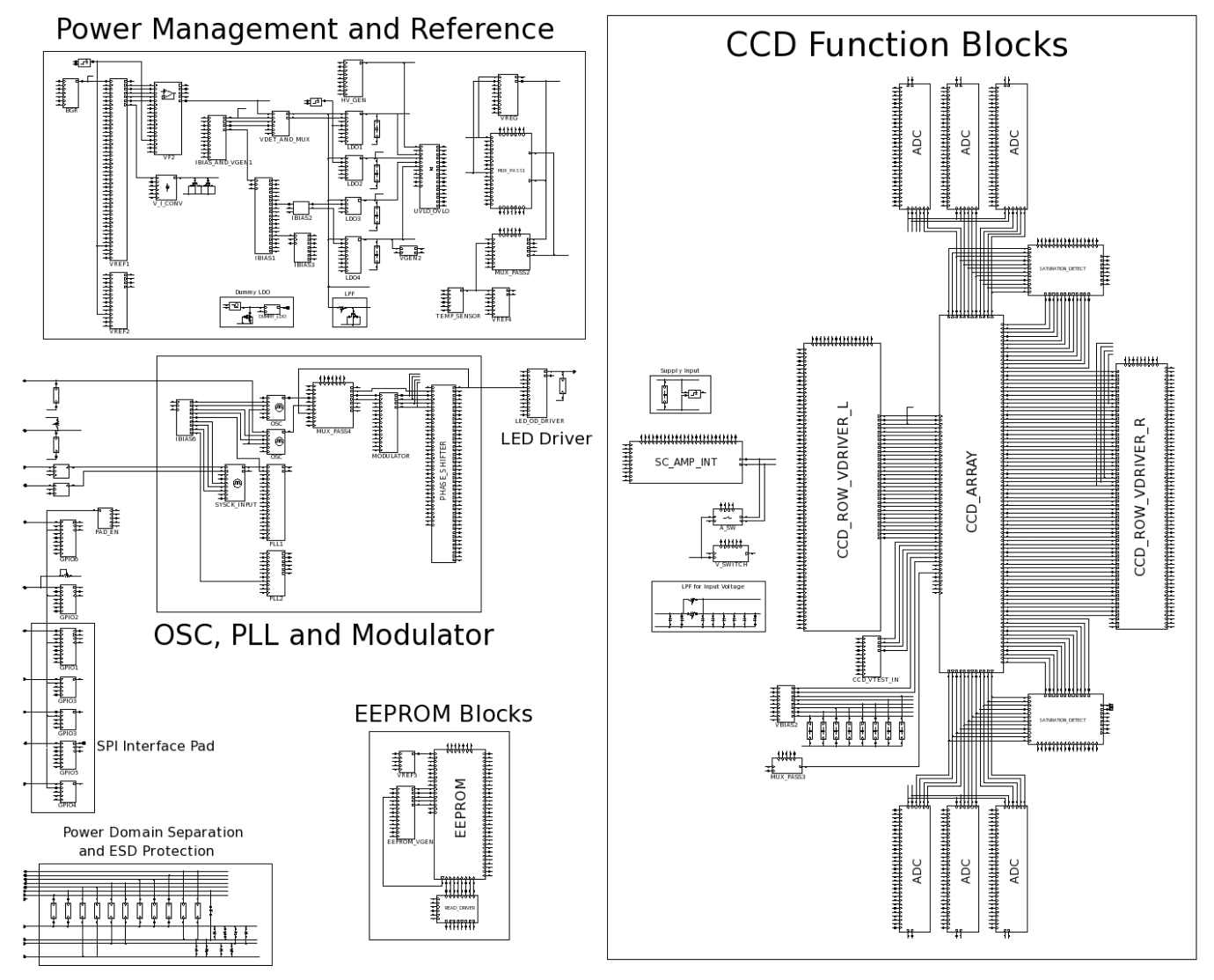
圖2.通過BunnyGS軟件分析整理後的Top電路原理圖
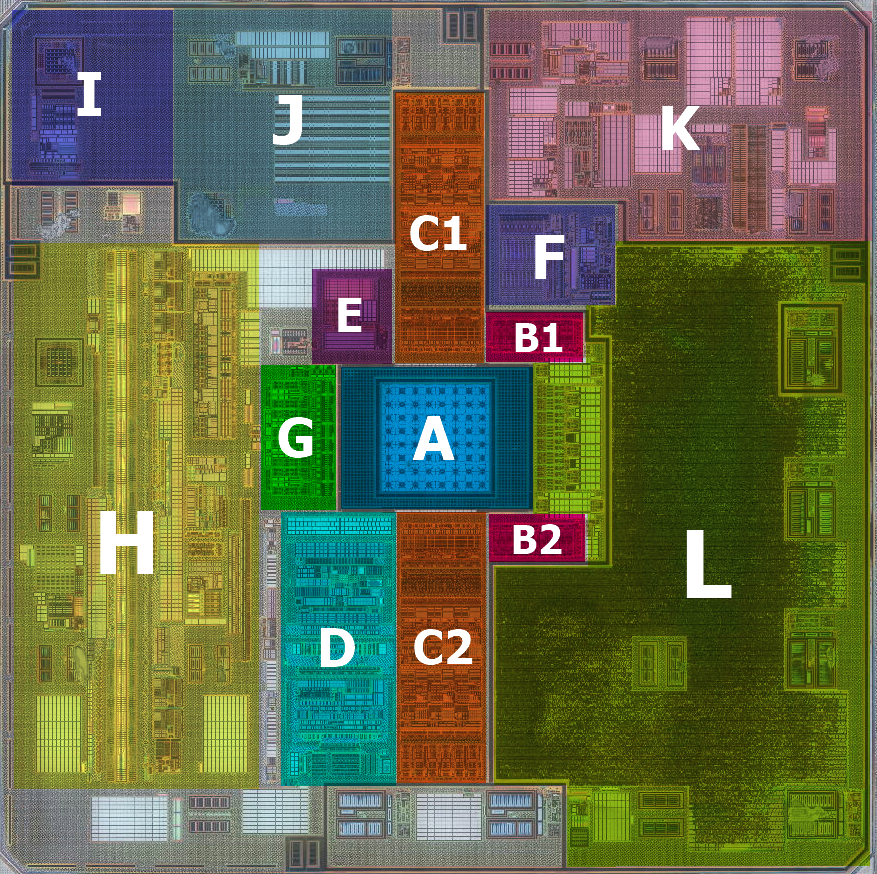
圖3、芯片版圖架構與功能分布

表1.芯片功能模塊說明
(5)根據基準時鐘和工作模式設置,ToF芯片首先產生內部調制信號,並通過LED驅動模塊輸出以控制外部紅外發光源(通常為850nm波長),輸出驅動可以是直接采用漏級開路(LEDOD)的模擬驅動方式,也可以是通過輸出推挽信號(LEDPP)的數字驅動方式,時鐘調制信號直接決定了ToF芯片的光學檢測性能。在ToF芯片中,通常需要刻意將調制信號做壹定的相位延遲後再用於LED驅動輸出,其目的是在壹定的距離範圍內,使調制信號和解調信號之間的相位差保持相對固定。Epc611芯片采用了49級延遲線(DLL)電路,其中每壹級采用RC充放電延遲結構。
(6)光電傳感器陣列將探測物體反射回的紅外光轉換成光電荷,並根據信號解調後的相位信息,分別存儲到每個像素內的MGA和MGB兩個電荷阱中。積分周期結束後,通過行掃描和列讀出電路的配合,每個像元內的電荷A和電荷B分別被放大讀出,並通過相關電路(Correlator)計算出差值以抵消環境光的影響,從而獲得有效相位信息,該相位信息再通過列ADC模塊轉換成12位數字信號輸出。數字相位信息通過SPI串行通信協議被從芯片傳輸給上位機,以計算得出最終的相應距離信息。列讀出放大器(見圖4)和ADC轉換比較器(見圖5)是其中影響精度的關鍵模塊。
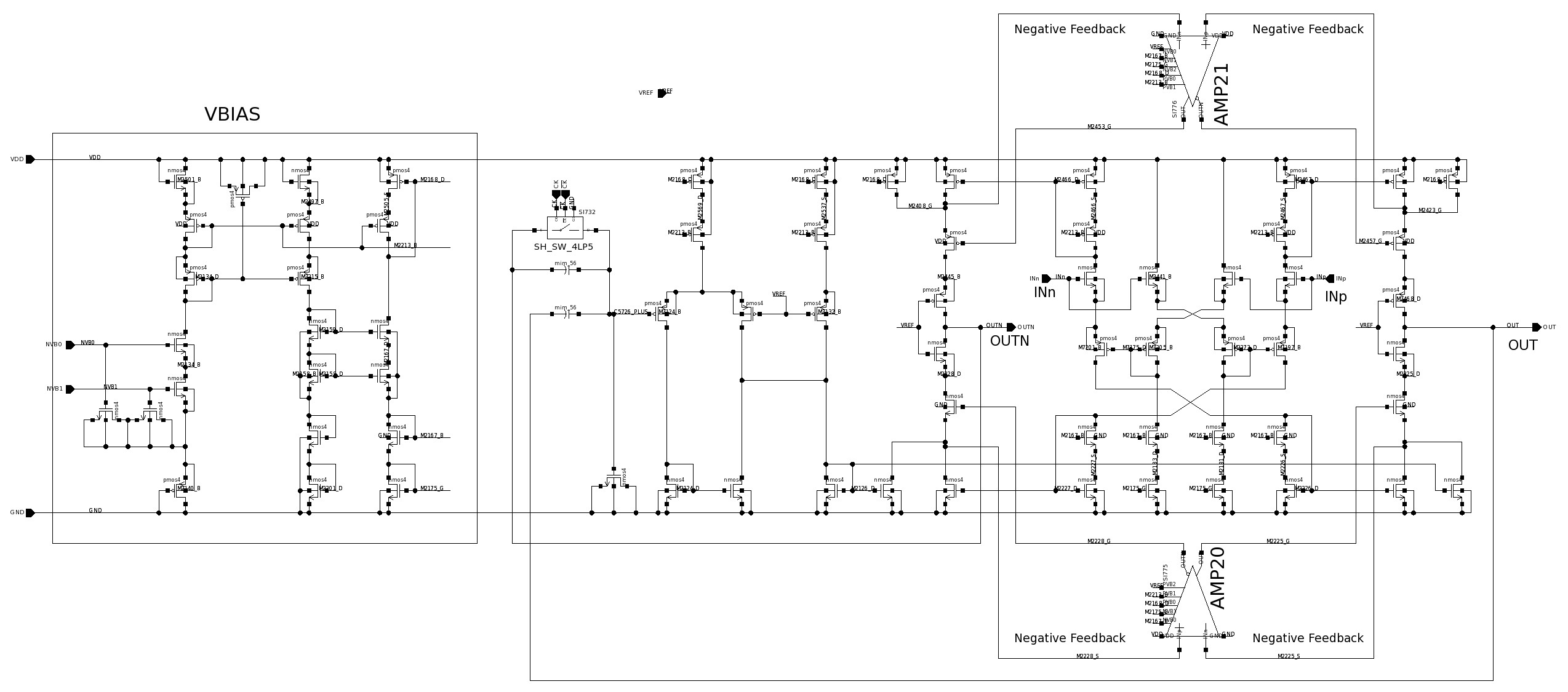
圖4.列讀出放大器
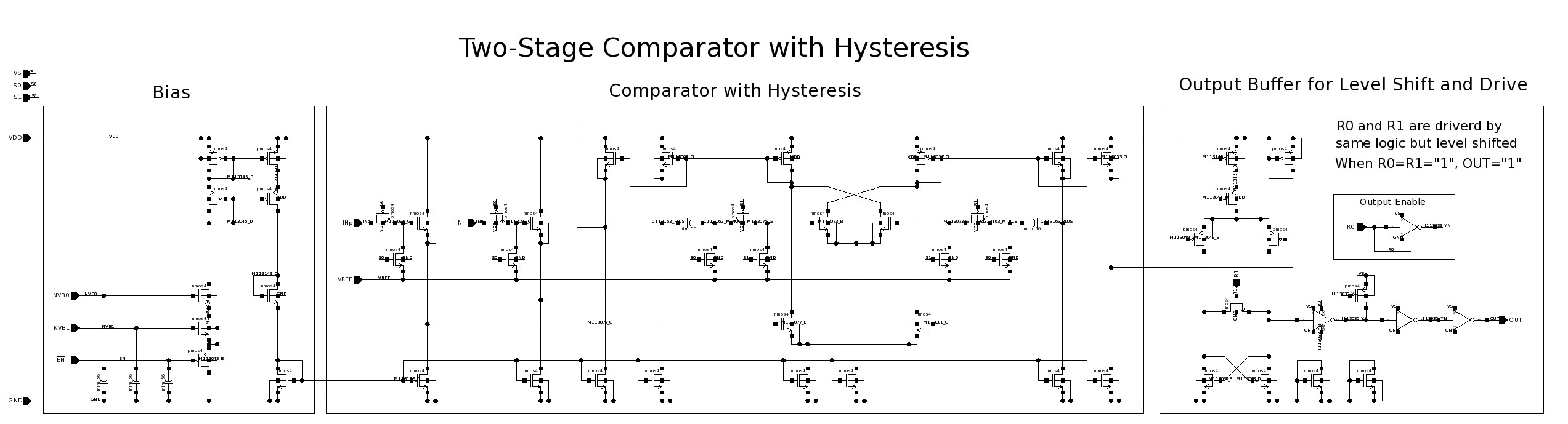
圖5.ADC轉換比較器
(7)Epc611芯片的內部電源管理包括了4個LDO線性降壓變換器和1個電荷泵升壓變換器。電荷泵升壓變換器(見圖6所示)是將8.5V的輸入電源VDD變換成12V的內部高壓。3個LDO調壓器分別將輸入電源VDD變換成5V的模擬電源VDDA、1.8V的數字電源VDDCORE和時鐘電源VDDPLL。另外,還有1個LDO調壓器將電荷泵升壓電路產生的12V內部高壓變換成10V的光電檢測電源VDDHPX。所有的內部調壓電路都配有過壓和欠壓保護電路。
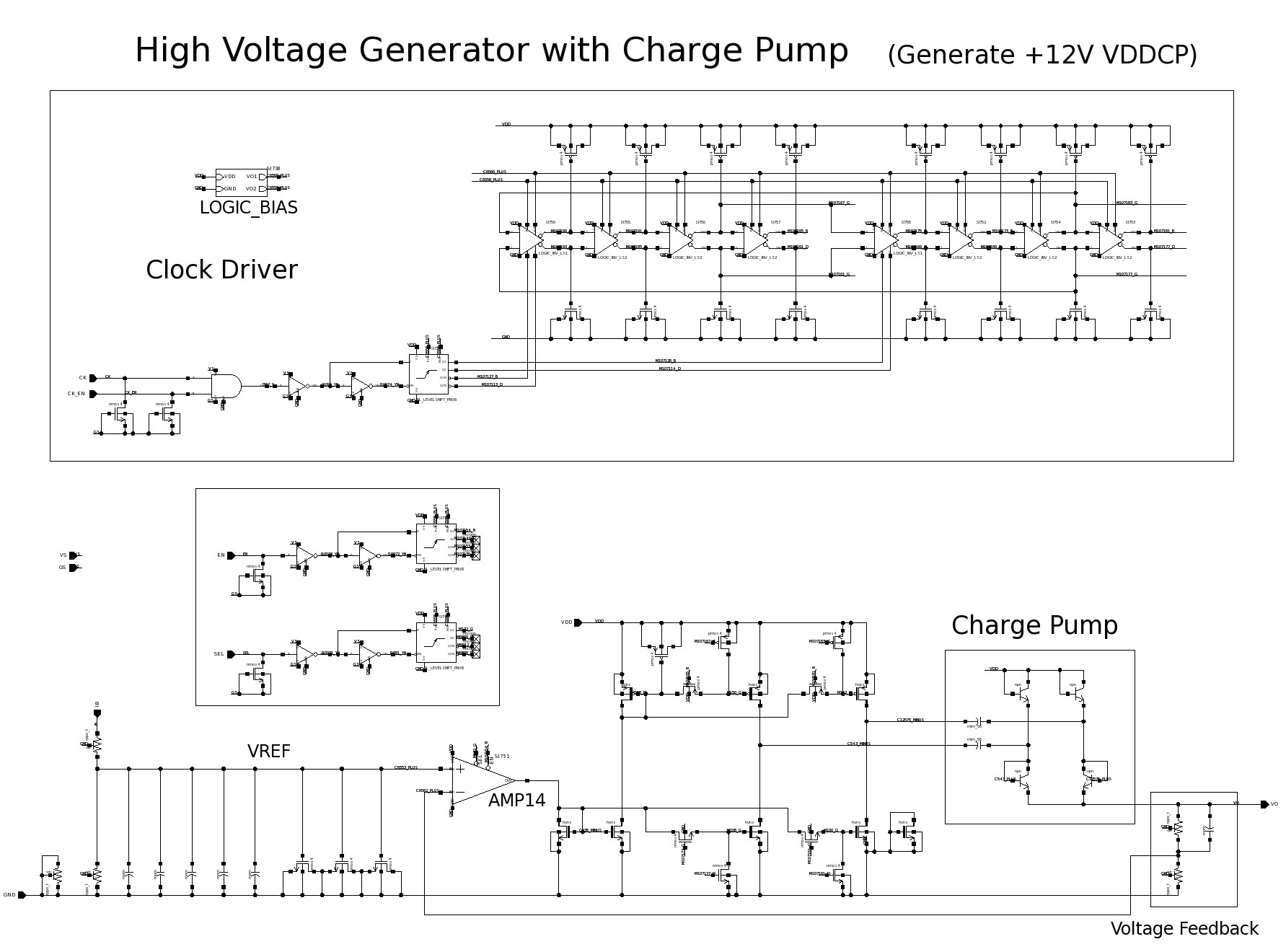
圖6.電荷泵升壓變換器電路
除了以上描述的完整的ToF信號鏈電路和內部電源管理電路,Epc611芯片還包括了壹個128字節的片上EEPROM模塊以存儲配置信息和校正數據,以及測溫電路等輔助功能模塊。

根據波士頓咨詢公司2015年預測,到2025年,通過3D成像技術實現自動駕駛的市場份額將會占到汽車總市場份額的25%。其中最關鍵的圖像傳感器CMOS由於成本低、工藝兼容信好、信號讀取靈活等優點,將會被廣泛應用於ToF三維測距相機上。總而言之,ToF芯片在未來有著極為廣闊的應用場景。